
ISSN Print 2306-6326
ISSN Online 2713-2773
НАУЧНО-ПРАКТИЧЕСКИЙ РЕЦЕНЗИРУЕМЫЙ ЖУРНАЛ ФМБА РОССИИ
Нейроинтерфейсы, то есть устройства, позволяющие обмен информацией между мозгом человека и компьютером, рассматривают как источник новых возможностей для людей с различными моторными нарушениями. С помощью нейрокомпьютерного интерфейса пациент может "силой мысли" управлять протезом конечности, инвалидной коляской, синтезатором речи и пр. Однако, поскольку данные технологии все еще находятся на начальных этапах медицинского применения, существующие нейроинтерфейсы зачастую требуют доработки и совершенствования
Исследователи из Университета Питтсбурга (США) предложили инновационный подход к улучшению контроля над роботизированным протезом руки у пациента с посттравматической тетраплегией. Роботизированная рука позволяет имитировать функцию парализованной или ампутированной верхней конечности. Однако манипуляции ей пациент контролирует лишь зрительно; сенсорное восприятие, которое у здоровых людей обеспечивается афферентной иннервацией, недоступно. У человека с ампутированной рукой афферентные импульсы можно имитировать, стимулируя периферические нервы выше уровня ампутации, но в случае поражения спинного мозга такой подход будет неэффективен.
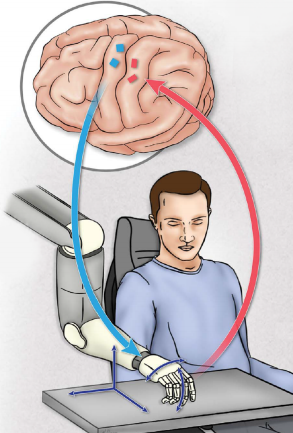
Ученые усовершенствовали имеющийся нейроинтерфейс механической руки путем вживления микроэлектродных имплантов в определенные участки коры левого полушария. Объектом эксперимента стал 28-летний доброволец, обездвиженный вследствие автомобильной травмы позвоночника. В соматосенсорную кору были вживлены электроды, связанные с сенсорами на механической руке и воспринимающие информацию об осязаемых ею объектах, силе захвата и т.д. В моторную кору пациенту имплантировали электроды, регистрирующие активность эфферентных нейронов в ответ на сенсорные импульсы. В ходе функциональных тестов было выявлено значительное улучшение контроля и управления роботизированной рукой по сравнению с традиционным нейроинтерфейсом, опирающимся только на зрительное восприятие. Так, время выполнения заданий по захвату и переносу предметов при стимуляции коры сократилось вдвое по сравнению с традиционным способом управления рукой.
Таким образом, было показано, что искусственно вызванная тактильная чувствительность прогрессивно улучшает функционирование высокотехнологичного протеза конечности. Авторы работы надеются, что их изобретение повысит качество жизни людей с инвалидностью уже в недалеком будущем